마주 오는 차 헤드라이트가 순간적으로 시야를 가릴 때, 대부분의 운전자는 그냥 눈을 찡그리고 버틴다. 달리 방법이 없어서다. 그런데 그 0.5초가 실제로 사고를 낸다. 어댑티브 헤드라이트, 정확히는 디지털 매트릭스 라이트가 바로 이 문제를 정면으로 공략하는 기술이다. 기존 헤드라이트의 구조적 한계를 넘어, 빛 자체를 능동적으로 제어해 운전자와 보행자 모두를 지킨다. 단순한 조명 업그레이드가 아니라, 야간 안전 기술의 접근 방식이 바뀌는 것에 가깝다.
눈부심 문제, 왜 이제까지 못 풀었나
야간 운전의 딜레마는 단순하다. 어둠을 밝히려면 헤드라이트를 써야 하는데, 그 빛이 반대편 운전자 눈을 찌른다. 상향등이 시야 확보에는 훨씬 유리하지만 선뜻 쓰기 꺼려지는 이유다. 기존 헤드라이트는 여기서 근본적 한계가 있었다. 켜거나 끄거나, 아니면 조사각을 기계적으로 바꾸는 게 전부였다. 빛을 지능적으로 쪼개서 일부만 끄거나 조절하는 건 구조상 불가능했다. 능동형 안전 장치로서의 헤드라이트가 필요해진 배경이 여기에 있다.
디지털 매트릭스 라이트의 핵심 원리
작동 원리는 이렇다. 수백~수천 개의 초소형 LED를 각각 독립적으로 제어한다. 이 LED들은 전방 카메라 센서와 실시간 연결된다. 반대편 차량이 감지되면, 그 차가 있는 영역의 LED만 끄거나 밝기를 낮춘다. 나머지 LED는 그대로 최대 밝기를 유지한다. 디스플레이 화면에서 특정 픽셀만 끄는 것과 같은 논리다. 빛의 패턴 자체를 능동적으로 변형한다는 게 핵심이고, 이게 기존 기술과 근본적으로 다른 지점이다. 도로 표지판의 빛 반사를 줄이거나, 보행자 위치에 빛을 집중시켜 경고하는 것도 같은 방식으로 구현된다.
주요 기능과 운전 편의성 향상
디지털 매트릭스 라이트의 기능 목록은 꽤 인상적이다.
- 정교한 눈부심 방지: 마주 오는 차 운전석 위치를 픽셀 단위로 파악해 그 부분만 소등한다. 앞차 운전자의 후사경 눈부심도 함께 차단한다.
- 속도·상황별 광폭 조절: 고속 주행 시에는 빛을 길고 멀리, 저속이나 코너링 때는 넓고 짧게 자동 조정된다.
- 보행자·장애물 강조: 도로변 보행자, 자전거, 야생동물을 인식하면 해당 방향에 빛을 집중시켜 경고 역할을 한다.
- 도로 정보 직접 투사: 차선 안내, 공사 구간 경고, 내비게이션 방향을 도로 바닥에 직접 그려준다. AR 기술과 결합하면 별도 HUD 없이도 주행 정보가 눈앞에 바로 펼쳐진다.
야간 운전 피로도가 낮아지고, 돌발 상황 인지 속도도 빨라진다. 전반적인 운전 안전성을 크게 향상시키는 건 당연한 결과다.
기존 헤드라이트 기술과 뭐가 다른가
헤드라이트 기술의 계보는 할로겐 → HID → LED 순으로 이어져 왔다. 광원이 바뀌면서 밝기, 수명, 전력 효율이 개선됐을 뿐, 빛을 제어하는 방식 자체는 크게 달라지지 않았다. 한때 쓰이던 AFS(Adaptive Front-lighting System)는 스티어링 휠 조작에 따라 헤드라이트가 물리적으로 방향을 돌리는 방식이었다. 솔직히 절반짜리 해결책이었다. 빛의 방향을 바꾸는 것과 빛의 패턴을 픽셀 단위로 제어하는 건 완전히 다른 차원의 기술이니까.
디지털 매트릭스 라이트는 광원을 수천 개의 독립 제어 유닛으로 나누고, 이를 소프트웨어로 실시간 조작한다. 빔 프로젝터가 화면 특정 구역만 밝히거나 어둡게 하는 것과 같은 논리다. 센서 데이터와 연동해 빛을 실시간으로 조절하는 이 방식이 가진 압도적인 정밀도와 유연성은 기존 기술로는 흉내 낼 수 없었던 부분이다.
규제 변화가 열어놓은 가능성
유럽에서는 이 기술이 이미 수년 전부터 일반 차량에 탑재됐다. 문제는 미국이었다. 연방 규정 자체가 이런 능동형 조명 시스템을 허용하지 않는 구조였다. Ars Technica가 전한 바에 따르면, 최근 미국에서도 관련 기술 표준이 재정립되면서 드디어 문이 열렸다. 이건 단순히 새 기능이 추가되는 문제가 아니다. 자동차 안전 기술의 패러다임 자체가 바뀌는 계기다.
규제 장벽이 낮아지면 제조사들의 개발 속도도 빨라진다. 더 많은 차종에 이 기술이 탑재될 거고, 장기적으로는 야간 교통사고 통계에도 변화를 줄 가능성이 높다.
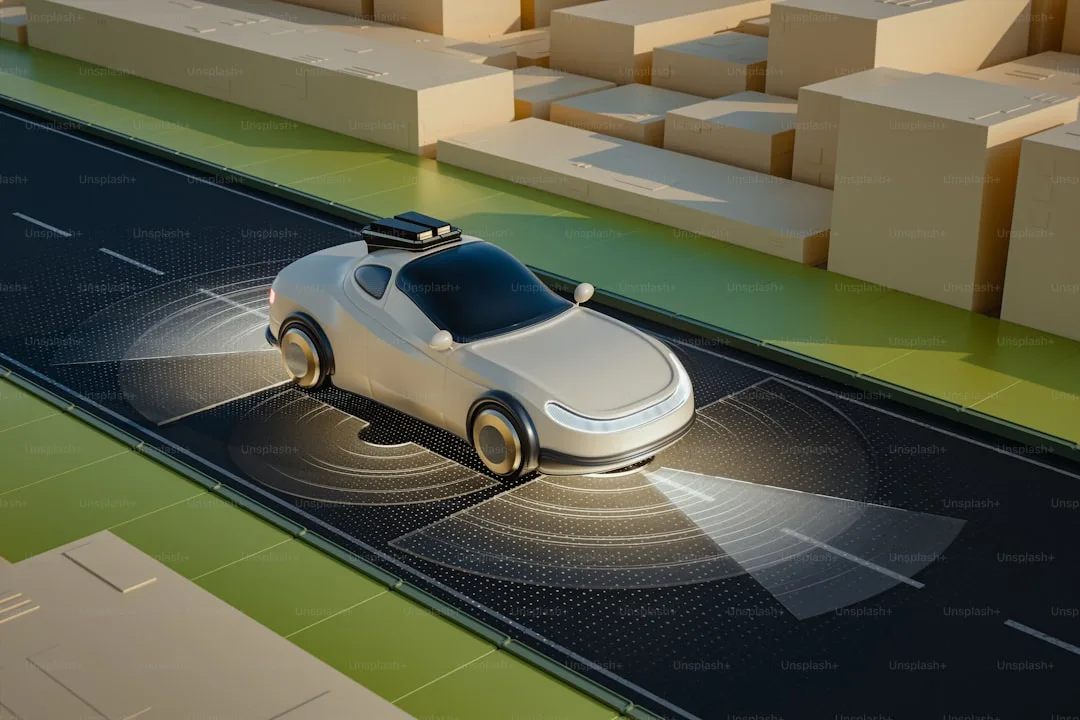
자율주행 시대, 헤드라이트의 새 역할
디지털 매트릭스 라이트는 자율주행 시대와 궁합이 맞다. 차가 스스로 주변 환경을 인식하는 능력을 갖추면, 그 인식 결과를 외부에 전달할 수단도 필요해진다. 헤드라이트가 그 역할을 맡는다. 단순한 전방 조명이 아니라, 차량의 ‘눈’이자 ‘소통 채널’이 되는 것이다.
실제로 이런 시나리오가 논의 중이다. 자율주행차가 보행자를 감지하면 헤드라이트로 바닥에 횡단보도 모양을 투사하고, 좌회전 예정이면 진행 방향을 미리 바닥에 그려 알린다. 빛을 이용한 정보 전달은 미래 모빌리티 환경에서 직관적이고 효율적인 소통 방식으로 자리잡을 공산이 크다. 어디까지 발전할지, 아직 가늠이 안 될 정도다.
출처: Ars Technica